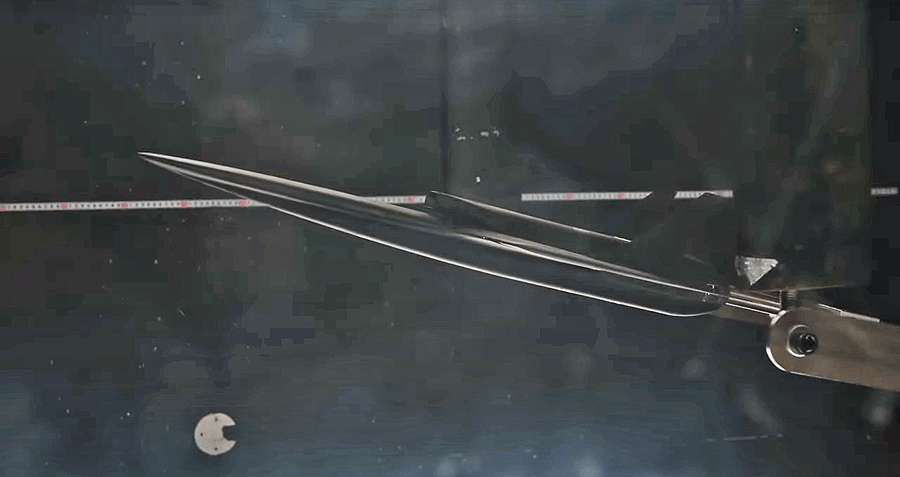
In 2017, German pilot Niels Herbrich flew his remote-controlled plane at a speed of 465 mph (Mach 0.62). Six years later, his speed record has still not been broken. The Mach Initiative aims to break this record with an aircraft reaching speeds exceeding 600 mph (Mach 0.8) at sea level. The University of Bath employed small, tightly integrated teams of students to facilitate rapid iteration of designs. The team went from concept to manufacturing of the Kingfisher aircraft in less than eight months. Recording requirements require aircraft to take off and fly alternately through a timing track 35 meters high and 400 meters long before landing, refueling and repeating. Thrust must be generated using air-breathing engines.
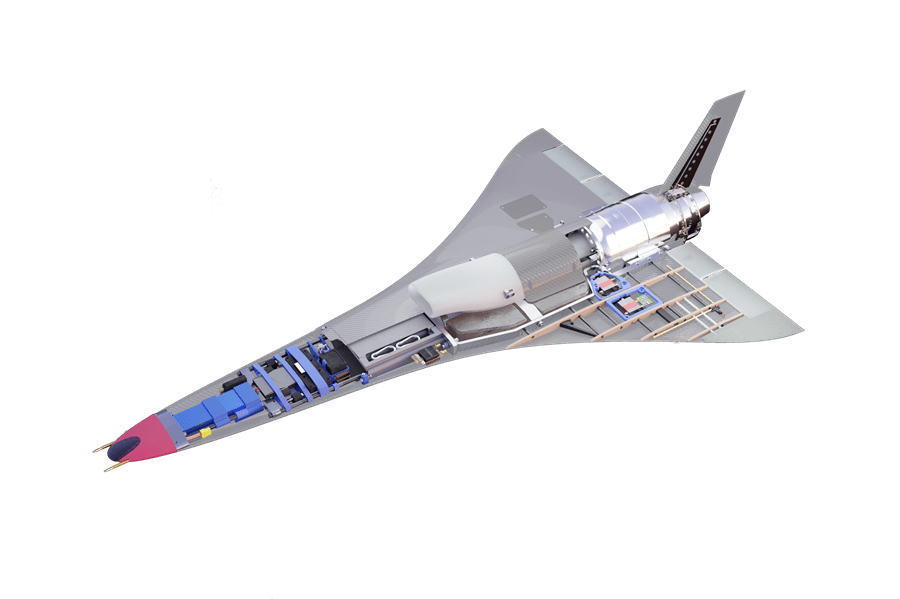
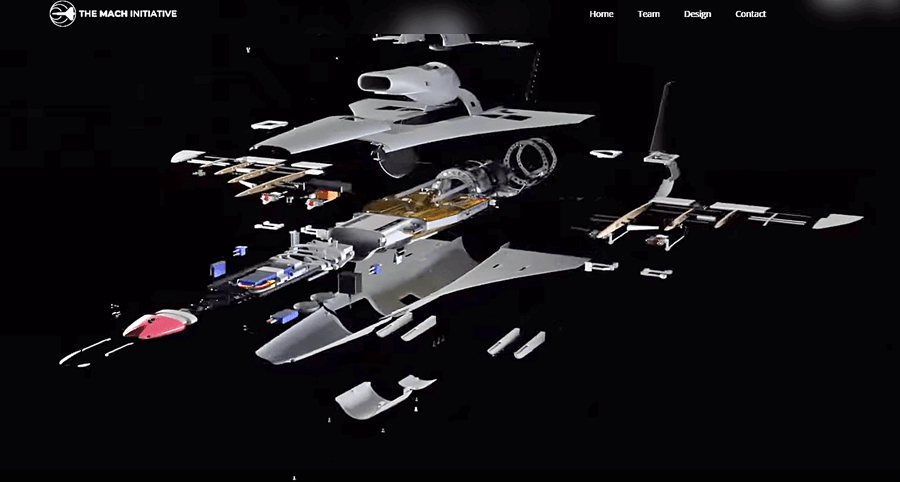
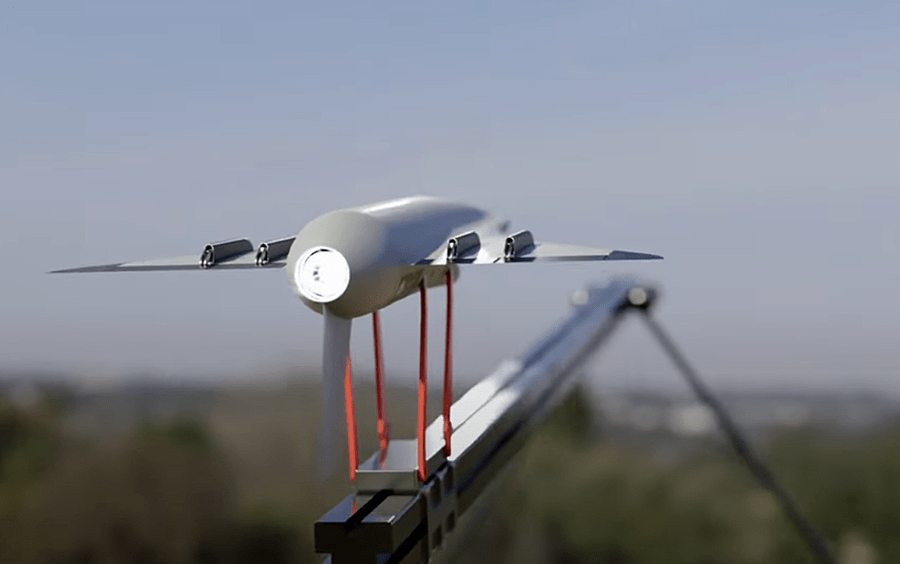
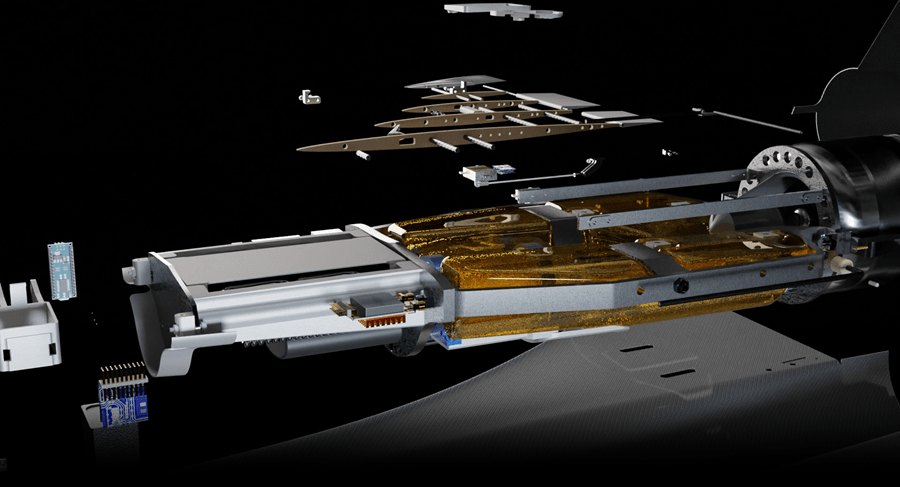
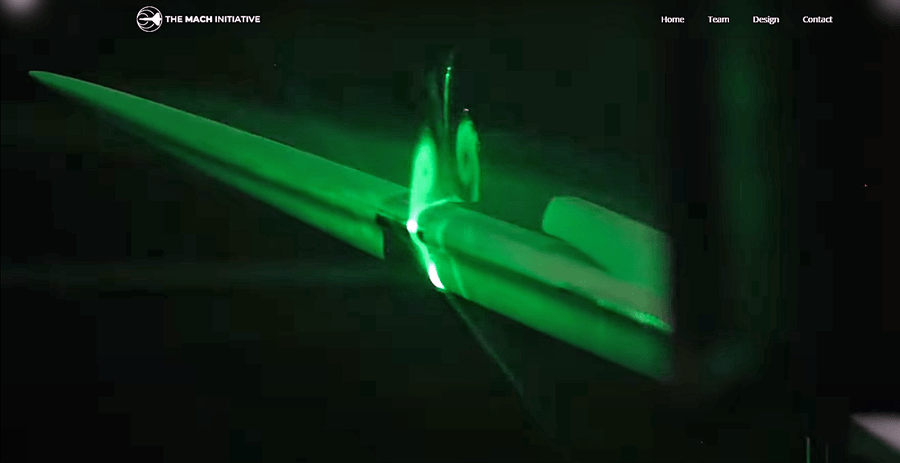
Kingfisher is a 1.3m long mixed delta wing powered by Jetcat P300 Pro micro turbojet engines. Kingfisher is launched from a pneumatic catapult system and performs a series of accelerated turns on a timing track to reach 610 mph (Mach 0.8 at sea level). To keep the intake on the ground for propulsive performance, the Kingfisher performs most of its flight upside down and then rolls over for a belly landing to eliminate the need for landing gear. Kingfisher also carries a parachute flight termination system along with redundant avionics and flight control systems to ensure it never leaves the testing envelope using a safety hierarchy. The team worked closely with Callen Lenz during the design process, learning a wealth of expertise in commercial UAV development, including working with pilots to ensure the aircraft was airworthy. The fiberglass semi-monocoque structure, chosen for radio transparency, has been optimized using Finite Element Analysis, with internal ribs, bulkheads and spars also providing mounting points for off-the-shelf components and access hatches for maintenance. Meanwhile, four elevons control the aircraft in pitch and roll, which is large enough to trim the aircraft if one fails. It is controlled using the Pixhawk Cube autopilot, which also supports autonomous GPS waypoint missions, along with an FPV camera and laser altimeter to maintain 35 meters above ground on a timing track. Story and photos courtesy of The Mach Initiative.